Ph.D. Thesis
Integrated SPAD-based endoscopic cameras for biomedical applications (François Piron)
Endoscopic surgery, also known as keyhole surgery or minimally invasive surgery (MIS) uses small incisions or natural body openings and a miniaturised high-resolution camera in order to diagnose and treat diseases.
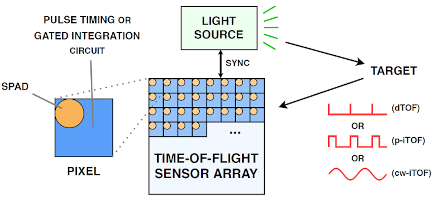
In this doctoral research, we aim to add an extra layer of information to complement the visual scene currently captured. Specifically, we target the design of a time-of-flight imager integrated circuit (IC), containing a single photon avalanche diode (SPAD) array, providing the distance between the camera and the elements constituting the visual scene, thus granting effective 3D vision to the surgeon and/or surgical robotic equipment.
Depth imagers based on SPADs usually target long-range use cases. This research aims at adapting the time-of-flight techniques to this short-range application and leverage its specific constraints to develop innovative methods and obtain a better depth resolution than what is typically presented in the literature.